

Research
Our research focuses on exploring biology to develop advanced and programmable soft materials and structures with advanced functionalities enabling adaptation, autonomy and environmental responsiveness.
We are building an interdisciplinary and collaborative research group with a vision to advance science and society with the design of sustainable bio-inspired morphing structures. This gives the BIM lab team the opportunity to design structures inspired by biological discoveries, to find solutions that push the boundaries of what is though possible in the field, and to make major advances in multiple engineering applications such as aviation, healthcare, and environmental science.
High Fidelity Modeling Recoverable Interfaces
Inspired by natural materials such as nacre, this work develops a new framework for designing brick-and-mortar composites with reversible interfaces that combine strength, toughness, and damage tolerance. By integrating continuum mechanics with cohesive zone modeling, the approach captures the complex behavior of interfaces under tension, compression, and shear, enabling realistic prediction of engagement, degradation, and failure in systems such as hook-and-loop fasteners. The framework further incorporates nonlinear cohesive formulations to account for viscoelasticity, elevated temperatures, and cyclic fatigue, providing a pathway to model real-world operating conditions. Together, this work establishes a foundation for engineering energy-dissipative materials.

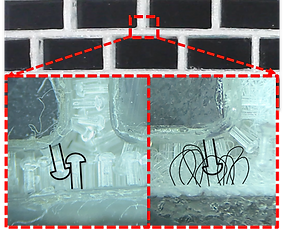
Bio-inspired Active Hook & Loop Fastener
Reimagining fastening beyond conventional solutions such as Velcro®, this work advances a new class of adaptive interlocking systems that actively respond, reconfigure, and recover during use. By combining shape memory materials with computational design, these systems enable hooks that can dynamically change geometry, enhance engagement, and restore performance after repeated cycles, overcoming the limitations of traditional passive fasteners. Moving beyond conventional hook-and-loop systems, the research develops physics-informed loop generators to replicate the complex, stochastic structure of fibrous loop fields, enabling large-scale simulation of hook–loop interactions. These digital environments are integrated with optimization frameworks and machine learning to systematically identify high-performance hook geometries for strength, durability, and controlled, low-damage disengagement. The result is a shift from static fastening toward intelligent, reusable, and silent interfaces with broad potential in robotics, aerospace systems, wearable technologies, and modular assembly.

4D Printing of Active Composites
Advancing the design of responsive materials, this work explores multi-material 4D printing of shape memory polymer composites that can actively reconfigure and recover functionality after deformation. By combining rigid and compliant phases, PLA and TPU in this case, these systems achieve a balance between stiffness, toughness, and recoverability, enabling structures that maintain load-bearing capability while adapting to repeated use. Building on this material platform, the research develops bioinspired interlocking architectures, including hook-based systems, that leverage shape memory effects to restore geometry and sustain engagement under cyclic loading. Through integrated experimental characterization and design optimization, this work establishes a pathway toward adaptive, durable structures for applications in robotics, modular assembly, and reconfigurable systems.

Active Interlocking Particles
This work investigates the mechanics of granular systems composed of shape memory particles that achieve structural stability through geometric entanglement. Unlike conventional particulate materials, these engineered shapes interlock under confinement when activated by a thermal stimulus, forming load-bearing assemblies with enhanced stiffness and stability. The study combines experimental characterization with computational modeling to understand how particle geometry, packing density, and interaction forces govern entanglement and load transfer under compression. This approach establishes a pathway toward tunable granular materials for adaptive packing, impact mitigation, and reusable cushioning systems.

Bio-Inspired Morphing Surface
Drawing inspiration from dynamic biological systems, this research focuses on the development of next-generation adaptive materials that can sense, respond, and reconfigure in real time, inspired by dynamic biological systems. By integrating actuation and functionality directly within material architectures, these systems move beyond passive structures toward autonomous, programmable behavior. The work explores how responsive materials can transition between configurations, modulate mechanical performance, and adapt to changing environments without external mechanical complexity. Such capabilities open new pathways for lightweight, multifunctional systems across robotics, aerospace, and biomedical applications, where materials are no longer static components but active contributors to performance and design.

Bio-inspired Active Wing Design
Engineered flight vehicles routinely exceed the capabilities of natural fliers in many aspects of performance, such as speed, range, and payload. However, there are many aspects of natural systems that are beyond current engineering capabilities such as maneuverability, gust recovery, and autonomy to easily reconfigure shape for different flight regimes and manipulate the environment. This project integrates comparative biomechanics, aerodynamics, and aerial robot design, with the goal of using understanding of biological systems to forward engineer novel unmanned vehicles that can fly well and adapt to disparate flight conditions and complicated air flow.